
Servo problems are one of the most frequently posted topics within the Arduino community. While problems may arise from programming, circuit design and faulty hardware, the vast majority or problems are a result of insufficient power or incorrectly connected power.
Control is nothing without power !
The Arduino itself is very good at controlling servos, the Servo library will allow a single Arduino to control upto 12 servos with no additional hardware.
http://rcarduino.blogspot.com/2012/01/can-i-control-more-than-x-servos-with.html
What the Arduino cannot do is deliver power to 12 Servos, its questionable whether an Arduino can reliably deliver power to even a single servo.
Power - Not All Servos Are Created Equal
While building the circuit for the pictures in this post, I decided to
measure the current drawn by each of the test servos with no load applied.
Each of the servos is the standard size used in radio controlled cars,
they are all low end servos available for between 10 and 15 dollars.
No Load Current Of Test Servos In mA

The Bluebird draws five times more current at no load than the Futaba, its also less smooth and the least expensive of the servos tested.
The current at no load is only relevant in a small number of applications, all of the servos drew more than the the maximum 250mA I was able to measure when subjected to a light load in the form of finger pressure.
I will be interested to follow up this test in a future post using a variety of repeatable loads to compare servo performance and current draw. The fact that the lowest cost servo draws five times more current than the Futaba servo suggest that this will be an important concern for larger autonomous projects which will need to operate both under their own power and under load.
Note that while controlling all four servos the Arduino drew only 10mA from its separate power source.
So How Can Successfully Drive Lots of Servos With An Arduino ?
The power problem is easily solved through the addition of a 'power circuit'. This is can be as simple as four disposable AA Batteries such as you might use in a camera or toy car.
4 Domestic AA Batteries in a holder

Rechargable AAs are an even better option, they store as much charge, deliver as much current and can be used again and again.
For large projects which need to operate under their own power the basic concept is the same however the choice of battery technology will be different. See the 'Performance Power' section in Part 2.
So why do we need two power circuits ?
The Arduino has a narrow operating voltage around 5 Volts (3.3 Volts in some) and is sensitive to variation in this voltage. The Arduino design is based on the assumption that a stable 5 Volt power source will be feeding the chip at the heart of the Arduino. In the case of the popular UNO, this regulated 5 Volt power is supplied by the USB Connection or through a regulator built into the board.
The onboard regulator is designed to provide power to the Arduino and supporting circuitry. It is not designed to power external devices and trying to do so is the single most common reason for failure with servo projects. This 'Not designed to power external devices' also applies to USB Connected projects.
The remainder of this post provides a walk through of setting up an Arduino servo example which will drive four servos from the Arduino using a separate power pack to meet the power requirements of the servos.
Arduino Servo Walkthrough -
1) Power The Arduino
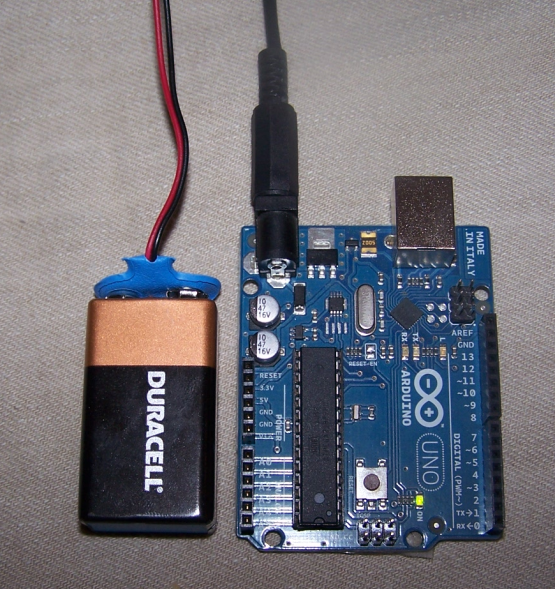
The Arduino has been loaded with my Multi Sweep example sketch, a link is provided at the end.
While running the servos, the Arduino was drawing only 10mA. A good PP3 could power the Arduino for days, after all, they power smoke alarms for months.
See the note below for more on the PP3 and why its not a good battery for use elsewhere in your projects.
Note - The PP3 is a poor battery choice for most applications, it has a small charge capacity (run time) and cannot deliver the higher currents required to drive servos or motors, however the 9 volts it provides is great for powering an Arduino through the onboard regulator. As the Arduino makes so little demand on a battery the PP3 is a common and practical choice to power the Arduino - just not any shields, motors, servos, transmitters etc.
The PP3's small charge capacity and limited ability to deliver current make it an unsuitable choice for providing the power circuit in our projects, the common AA battery is a far better alternative. In the case of servos the 9 Volts supplied by an unregulated PP3 is over the 4.8 to 6 volt recommended operating range and will result in immediate damage to the servo. Again AA Batteries are a better choice as four will provide a usable 6 Volts for our servo power circuit and a better run time.
This wont work for me, I need USB for Serial Output -
This is no problem at all, you can simply connect the USB Cable to the Arduino as you normally would. This will provide power to the Arduino so you do not need to use the 9V PP3 Battery.
You should still use the separate servo power and this will work provided that the ground from the battery pack is connected to the Arduino.
2) Power For The Servos
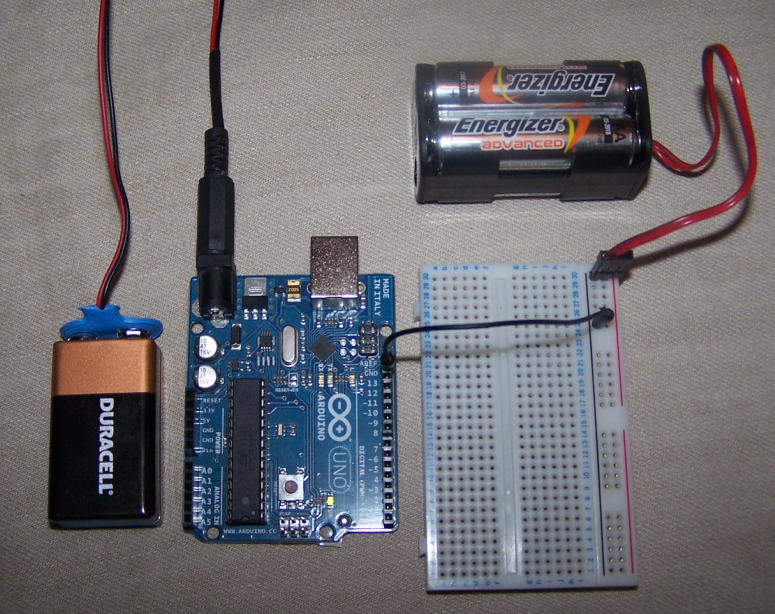
Each AA Battery provides 1.5 volts for a total of 6 volts (4*1.5).
Most servos are designed to operate with 4.8 to 6 volts. Powering them with more voltage can result in instant damage. The four AA Batteries give us a usable 6 volts.
I have connected the AA Batteries to the power (red) and ground (black) rails on my bread board.
Notice the black jumper running from the bread board to the Arduino ?
This is the next most common mistake in servo projects, when people introduce the servo power pack, they forget to connect a common ground.
You must connect the ground wire between the power circuit and the Arduino (control circuit) without this connection your circuit will not work. This applies whether you are powering your Arduino from a wall socket, USB port or a battery.
In the picture you can see where I have simply connected the two circuits through the black jumper wire running from the black ground rail of the bread board to the ground (GND) pin on the Arduino next to pin 13.
All of the ground pins on the Arduino are connected so use which GND pin is most convenient.
These two circuits now share a common ground allowing us to add some servos.
2) Connecting Individual Servo Power
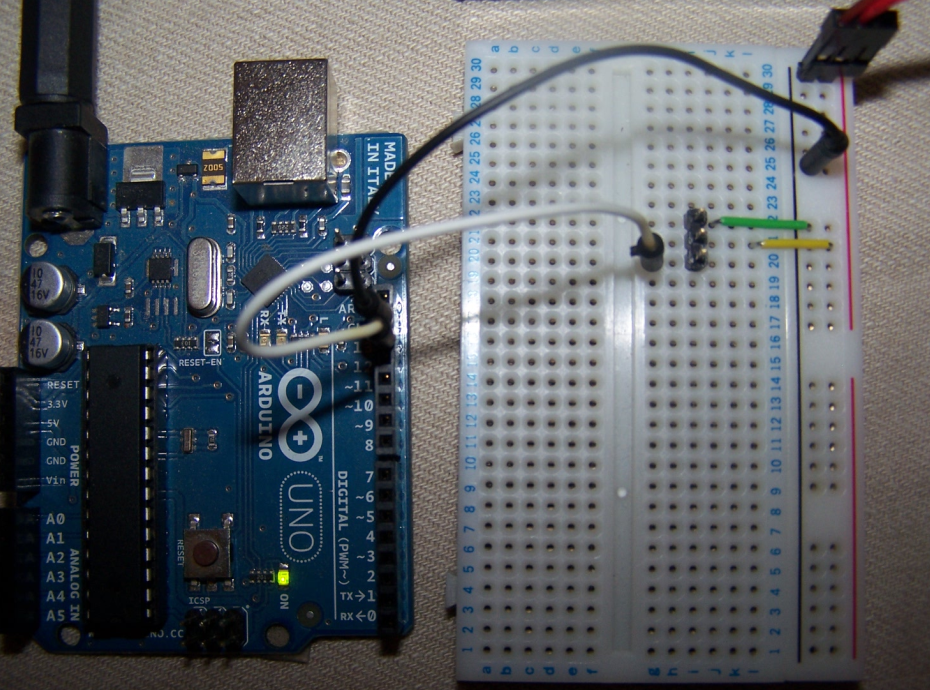
Next to this you can see that I have added a green jumper from the battery pack ground rail to pin1 of the header, this is the shared ground between the Arduino, battery pack and servo.
Next I have added a yellow jumper from the power rail - 6 Volts from the AA Battery pack - to the center pin of the header. This will provide power to our servo directly from the AA Battery pack, not from the Arduino or its 9 Volt PP3 Battery.
The final pin is the signal pin, this is the pin which the Arduino will use to tell the servo which position to hold.
Remember - Without the common ground between the Arduino and the Servo AA battery pack, your project will not work. In the picture, this common ground is provided by the black wire linking the ground rail of the breadboard with the GND pin next to pin 13 of the Arduino.
3) Adding a servo
All we need to do now is connect our first servo -

You can also see that I have added headers for three more servos following the same convention of yellow for 6Volt power from the AA Battery pack and green for the shared Arduino/AA Battery pack ground.
The servo is receiving its position signals from the Arduino through the white jumper wire connected to pin 13. Remember - Without the common ground (black wire) connecting the Arduino GND Pin to the ground (-) fo the battery pack through the black ground rail of the breadboard, this will not work !
If you have uploaded the multi sweep example sketch linked at the end of this post, you should see your servo sweeping back and forth.
4) Adding more servos
Once you have one servo up and running, you can add more by following the same convention - connect the servo plug to the header so that the end with the black wire attaches to the header pin with the green wire. You can then add a connection from the signal pin to any of the Arduino digital pins 2-13 and you should see your additional servos follow the same sweeping pattern as the first servo -
For the 'Multi Sweep' example sketch used in this video see the post - Can I control more than X Servos with an Arduino ?
Conclusions -
The Arduino can control large numbers of servos without additional hardware provided a separate power source is dedicated to the servos.
Four AA disposable or rechargeable batteries are a good choice for providing this power in smaller projects.
Large projects will require hobby batteries or fixed power supplies, part 2 will look at some of these options and the power demands of the test servos under a variety of loads.
Servo models used and current drawn at no load -
Servo Current mA
| Futaba S3003 | 55 |
| HITEC HS-322HD | 75 |
| ACE S1903 | 90 |
| Bluebird BMS410 | 250 |
Duane B
Nice article, congratulations. We need to see more of this real world product testing.
ReplyDeleteNjay
must be tested,and need one 18AWG power supply cord.
DeleteRcarduino: Servo Problems With Arduino - Part 1 >>>>> Download Now
Delete>>>>> Download Full
Rcarduino: Servo Problems With Arduino - Part 1 >>>>> Download LINK
>>>>> Download Now
Rcarduino: Servo Problems With Arduino - Part 1 >>>>> Download Full
>>>>> Download LINK nD
DeleteReally Work Fast,******************
Fast and reliable solution for Herpes Cure
I was cured from Herpes with herbal med..
Contact him for Relationship/marital problem,
He will give you the best..
Thanks to [[[robinsonbucler @ gmail com]]]
Thank you for your explanation. It was very helpful
ReplyDeleteHey, how do i rotate the servo in the opposite direction. currently i am rotating it from 0 to 45 and back to 0 but from this position i want to rotate it to -45 ie 45 in the other direction..how do i do that?
ReplyDeleteTry this, but using separate power rather than the circuit suggested in the link -
ReplyDeletehttp://arduino.cc/en/Tutorial/Sweep
Duane
so how many servos in total u can drive?
ReplyDeleteFrom the second paragraph -
ReplyDeleteThe Arduino itself is very good at controlling servos, the Servo library will allow a single Arduino to control upto 12 servos with no additional hardware.
http://rcarduino.blogspot.com/2012/01/can-i-control-more-than-x-servos-with.html
What the Arduino cannot do is deliver power to 12 Servos, its questionable whether an Arduino can reliably deliver power to even a single servo.
I was playing around with an Uno and Fubata FP-148 servo, and came across your explanation and demonstration. Very nice work - thanks!
ReplyDeleteHi, friend,you saved my day and project!
ReplyDeleteI am using an stepper motor with Easydriver from Sparkfun, and the motor was running without any command.
After I connected both grounds, all started to work fine.
Thanks a lot for your work making this post!
Hope others can use my experience.
I'm trying to run a s3003 off an arduino pro mini 5v. The system works fine when connected through a usb cable. But when I power it from a dc brick the servo acts nuts, I think the unit is continually resetting.
ReplyDeleteI've tried two dc adapters, one at 12v and one at 9v both supplying more than 1 amp. according the label on the dc adapters.
Can you tell me how I can test/troubleshoot? Can you confirm the wiring? I soldered the dc adapter to Vin and GND. I connect the servo's power line to the vcc pin on the side closest to d9.
Seems like there's not enough amperage to power it but 12v 1amp should be more than the 5v usb cable was providing, which I assume is .5 amp.
the 12v power source might not have any voltage smoothing (caps) built in so the down slope of the PWM especially under load can cause 0V to be recieved and the system reboots, splicing a 16V or higher cap into your 12V line should smooth out the down slope, and another cap on the supply side from board to servo should take care of the downslope from the arduinos PWM system.
DeleteThank you so much...this was very helpful
ReplyDeleteThanks a lot it is a really helpful article.
ReplyDeleteDude, this article rocks. Thank you so much, huge help for me.
ReplyDeleteSuper easy to read, well explained and demo'd, thank-you!
ReplyDeletemuchas gracias me salvaste el proyecto ahora si funciona correctamente
ReplyDeleteThank you for your explanation! Battery Led Picture Light
ReplyDeleteThank you soooo much for the extremely clear, extremely helpful article!
ReplyDeletehey duane b, i can't seem to find the link to the multi sweep sketch :(
ReplyDeletehttp://rcarduino.blogspot.ae/2012/02/can-i-control-more-than-x-servos-with_03.html
ReplyDeleteDuane
Am I correct in assuming that this will work for bigger Servos as well without damaging my Arduino? I'm new to Arduino and I thought a Servo checker would be a fun project as it would be handy at work, we have servos ranging from 12 to 48 volts DC. As long as I make sure the voltage to the Arduino board is kept at the proper voltage, I can use whatever power supply I need for the servo, correct?
ReplyDeletethanks in advance.
Is part2 about large project power supply?
ReplyDeleteIs it available?
Deletehttp://rcarduino.blogspot.ae/2012/04/servo-problems-part-2-demonstration.html
ReplyDeleteDuane
great explanation! but i'm still confused,
ReplyDeleteis it possible to drive 2 servos with the 9v battery?
9V is too high for servos, they typically operate on 4.8 to 6 volts. A quick and easy way to get this voltage is to use 4 AA Batteries instead of one 9v battery. The 4AA Batteries will also support higher currents than a single 9V battery so your servos will support higher loads. Any model shop or electronics store will stock 4*AA Battery holders that you can use in your project.
DeleteYour arduino has a built in voltage regulator which can produce the steady 5V that your Arduino needs from a 9V battery.
In my standalone projects I often use a 9v to power the Arduino and 4*AA to power a servo or motors.
Duane.
This is entitled Problems with servos Part 1. Wheres Part 2?
ReplyDeletehttp://rcarduino.blogspot.ae/2012/04/servo-problems-part-2-demonstration.html
ReplyDeleteThank you for this amazing post, but what if i use Arduino UNO, 4 servos and i add an HC-05 Wireless Bluetooth RF Transceiver Module serial RS232 TTL and Ultrasonic Sensor Module HC-SR04, these both should connect to the Arduino power outputs? Or how should i power them?
ReplyDeleteHi there
ReplyDeleteJust wondering if this method can give enough power to operate 12 9g servos? (that is with the 4AA battery holder). Im currently using a mega board.
Thanks
I have an ESP8266 which works with 3.3V on the same breadboard as the servos. Is it correct to put the ground from the ESP, the Arduino and the battery pack (for servos) to one ground ??
ReplyDeleteIf you want to be able to send inputs/outputs between any two components or your project, they must have their grounds connected. So in your case I assume the ESP8266 is providing and input to the Arduino which is providing an output to the servos, in which case all three need to have a common ground.
DeleteDuane.
I have a project to power 4 servos & my custom pcb which has avr328(4-8mA) and a sensor shield working at 5 volts.
ReplyDeletethe sensor & avr have common power supply via single voltage regulator 5v o/p.
& the 4 servos have a separate power supply.
(ground is common)
I am a lil doubtful if i should us a single rechargeable 11.1v lipo 20-30c 1000mAH to powet the whole circuit.
or for the servos only(via another 5v 1amp voltage regulator)
Will it damage the servos?
Hi, There a couple of things to consider here -
ReplyDelete1) The step down from 11.1 to 5v is a lot for the regulator to handle, it might be better to consider a 2s Lipo which will output around 8 volts giving the regulator less work to do.
2) Each individual servo could draw 1 amp of current if it is heavily loaded, this will overload the regulator causing the output voltage to drop and effect all other components (AVR) that share the same regulator
3) Because of 2) above I would consider a separate regulator for the servos, in fact as the servos might each draw over an amp if they are heavily loaded you might want to consider a dedicated high output regulator for the servos or individual low cost regulators for each servo.
From memory the high output regulators are expensive and so you might prefer individual regulators, or if you project is just a short term desktop project chance a single regulator and accept that its not a production quality solution, but suitable for your own desktop entertainment if thats the goal.
Duane.
hi..i tried this but when i put the 4 AA bateries to the breadboard the black wire gnd of the battery got very hot and melted in a few seconds and the breadboard at that spot too..what went wrong??
ReplyDeleteThanks so much for this post, it really helped me.
ReplyDeletewont this method damage arduino?
ReplyDeletei mean extra current from external battery , which will be connected to ground of arduino should damage arduino.
and if it doesn't get damaged then what it the reason for it!
please answer!
Is it possible to have each servo move independently?
ReplyDeleteWow that's a wonderfull blog having all details & helpful. Power Cord
ReplyDeleteWow that's a wonderfull blog having all details & helpful. AC Power Cord
ReplyDeleteWow that's a wonderfull blog having all details & helpful. Power Supply Cord
ReplyDeleteWow that's a wonderfull blog having all details & helpful.UK power cord
ReplyDeleteWow that's a wonderfull blog having all details & helpful.UK power cord
ReplyDelete
ReplyDeleteNice blog to share you. it's a great information to share you.Buy Solar Battery in Online | Battery Dealers in Bangalore
This comment has been removed by the author.
ReplyDeleteI have 2 servos with their own battery controlled by remoter transmitter.
ReplyDeleteCan I power an Arduino-GPS from the same servo battery 7.2V, to avoid carrying a separate battery for the Arduino?
When the servo is used I guess the voltage will drop - is this a problem for the Arduino, and I how do I test without damaging anything?
thanks for any help, Mike
THANK YOU !!!
ReplyDeletevery good article thank you
ReplyDeleteWill this also work using a nano controller (instead of UNO)?
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteI was have similar problem. Servo do weird movement. Adding an external power supply solved issues.Thanx for tip.
ReplyDeleteAre you looking for a cash for cars ipswich? Then, you've came to the right place. All Cars Buyer provides excellent expertise in the areas of junk car removal, car disposal and cash for cars in all area of Caboolture . With more than 10years in automotive industry, we are largest buyers of the wreck automobiles ...
ReplyDeletePhone: 0403331443
This comment has been removed by the author.
ReplyDeleteExperience the most hassle free car removal and selling your unwanted cars, vans, free pick up. brisbane scrap car buyers
ReplyDeletePhone: 0429 794 488
This comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThanks I was having nightmares getting 6 servos to work with a mobile app. You TIP on the ground wire solved my issue. Great Post
ReplyDeleteYou provide such a great service. People can get good information from your article and sell a junk car to any right KW company and get good cash for their cars.
ReplyDeletecash for cars brisbane
cash for cars
cash for cars caboolture
scrap car removal brisbane
car removal caboolture
car removal gold coast
car removal brisbane
car removal ipswich
good article from u thanks for sharing.
ReplyDeletefactory automation
servo motor
Nice post.The core purpose of manufacturing Sears marketed DieHard batteries was to make it last longer than the car and has accomplished it to some extents, though. For more click on:http://www.powergenixsystems.com/cheap-car-batteries-in-review/
ReplyDeleteThis comment has been removed by the author.
ReplyDeletePeople can get good information from your article and sell a junk car to any right KW company and get good cash for their cars.You TIP on the ground wire solved my issue. Great Post
ReplyDeleteCar Buyers Gold Coast
Thank you very much for the information provided! I was looking for this data for a long time, but I was not able to find the trusted source.
ReplyDeletecar buyers brisbane
car buyers Logan
car buyers Ipswich
Car Buyers Gold Coast
scrap car removal Brisbane
scrap car removal Logan
scrap car removal Ipswich
scrap car removal Gold Coast
Cash for cars in Brisbane
Cash for cars in Logan
Cash for cars in Ipswich
Best Cars Buyer Brisbane
Top Cars Buyer Logan
scrap cars Ipswich
Scrap Cars Brisbane
cash for cars
ReplyDeleteEzy Cash For Cars Offers Free Car Removal Services in Brisbane, Sunshine Coast, Gold Coast and Sydney. We Offer Instant Cash for Cars Brisbane up to $9999"
Free car removal Ipswich
Cash for cars ipswich
Cash for car Ipswich
Free car removal Toowoomba
Cash for cars Toowoomba
Cash for car Toowoomba
Free car removal sunshine coast
Cash for cars Brisbane
Cash for car brisbane
Cash for cars
Cash for car
Free car removal
Free car removal brisbane
Cash for cars sunshine coast
Cash for car sunshine coast
Cash for car gold coast
Cash for cars gold coast
Free car removal gold coast
This is a very useful post, ! I agree that innovations are the most important thing for businesses because with today’s fast-changing world we also have to fast in our business strategy
ReplyDeleteMechanic Shop Near Me
Auto Repair Near Me
Service My Car Today
Quick Auto Service Shop
Car Service Near Me
Excellent post. I will certainly come back to read more of the articles about food. We love to try new receipts. My spouse and I stumbled over here by a different web address and thought I might as well check things out. I like what I see so now i’m following you. Look forward to looking over your web page yet again.
ReplyDeletecash for cars goldcoast
You have done a brilliant job making sure that people understand where you are coming from. And let me tell you, I get it. Please post more updates to cure. I discovered your blog website on google and check a few of your early posts. Still continue the good work. I just additional up your RSS feed to my MSN Information Visitor. Seeking forward to reading more from you down the road!
ReplyDeletemobile app development brisbane
I am not sure where you're getting your info, but great topic. I needs to spend some time learning more or understanding more. Thanks for magnificent information I was looking for this info for my mission. Hi there, simply became alert to your weblog through Google, and found that it's really informative. I’m gonna be careful for brussels. I will appreciate in case you proceed this in future. Lots of people will be benefited out of your writing. Cheers!
ReplyDeletecash for cars brisbane
Excellent post. I will certainly come back to read more of the articles about food. We love to try new receipts. My spouse and I stumbled over here by a different web address and thought I might as well check things out. I like what I see so now i’m following you. Look forward to looking over your web page yet again.
ReplyDeletesecond hand tyres
This comment has been removed by the author.
ReplyDeleteThis is Very very nice article. Everyone should read. Thanks for sharing. Don't miss WORLD'S BEST CARGAME
ReplyDeleteI've recently started a site, the info you provide on this web site has helped me tremendously. Thanks for all of your time & work.If you are looking to sell your junk car, here are some useful links to sell your car easily.
ReplyDeletecash for cars
car removal sunshine coast
car removal logan
car removal gold coast
car removal brisbane
cash for cars sunshine coast
cash for cars brisbane
cash for cars ipswich
cash for cars toowoomba
trade in car for cash
Some genuinely nice and useful info on this web site, too I think the layout has got fantastic features.
ReplyDeleteFor information about selling used cars,you can visit these useful links.
cash for cars
top cash for cars
we buy cars
cash for cars brisbane
cash for cars logan
cash for cars toowoomba
cash for cars gold coast
cash for cars sunshine coast
cash for cars ipswich
cash for cars caboolture
cash for cars melbourne
cash for cars sydney
ReplyDeleteNorton.com/Setup of action gives up help for set of Norton Security Products. Norton Antivirus programming can be gotten in the sort of retail cards that help through web as a decision to set up with the guide of a CD in significant set up of the security key.
norton.com/setup
Links offered inside the mailbox. Norton Anti Virus should be upgraded and Some of Norton's characteristics is the feature Accounts on the default , in addition, it scans the complete emails also blocks the Norton Internet Security is a security Program product from Which safeguards the apparatus.
ReplyDeletenorton.com/setup
norton.com/setup
Contact TurboTax Phone number to talk to a live person
ReplyDeleteIf you want to reach TurboTax Phone number to talk to a live person, no need to get worry. You can contact our experts whenever you want. The experts are available 24/7 for the help of users. Moreover, you can opt the option of live chat on which our experts will revert you.
How to Install TurboTax with CD/DVD on Windows 10?
ReplyDeleteTurboTax is one of the best software among many taxpayers. However, some of its users are unable to proceed on how to install TurboTax 2019 from CD on their own. If you are facing such difficulties in installing the software, contact us directly and ask your issue to one of our TurboTax experts.
McAfee antivirus is the threat defender program that the user can activate at mcafee activate card URL.
ReplyDeleteWith its individual, household, and multi-device subscriptions, McAfee serves ID Theft Protection as well as online & offline virus protection.
www.mcafee.com activate card |
www.mcafee.com/activate
ReplyDeleteThanks for writing this post. i was looking this kind of post since long time .here i have some Suggestion regarding this post
used car removals
accidental car removal
wrecked car removals
Cash For Unwanted Cars
Cash For Wrecked Cars
Cash For Scrap Cars
Buy junk cars Brisbane
Cash For Accidental Cars
During Norton Setup at norton.com/setup, Product key is very essential. To get the Norton Product key, scratch off the silver layer in the back of the retail card and preserve it geared up earlier than start the Norton setup. Here is a sample of Product key to make you understand: XXXXX-XXXXX-XXXXX-XXXXX-XXXXX.
ReplyDeleteThanks for all the tips mentioned in this article! it???s always good to read things you have heard before and are implementing, but from a different perspective, always pick up some extra bits of information. Visit@:- mcafee.com/activate | office.com/setup | adviser for you | mcafee.com/activate | mcafee.com/activate
ReplyDeleteGmail is one of the web-based email programs allowing users to send and receive any sort of messages instantly. However, some Gmail users are complaining: my Gmail isn’t receiving emails, how to fix it? If you want to get rid of such an issue, just get in touch with our Gmail expert team.
ReplyDeleteGmail is a great platform to send or receive emails the way that has been changed the life of each and every individual. However, recently some users have complained about the issue of Gmail not receiving emails. If you are getting stuck around looking for the way to fix it, get in touch with our team.
ReplyDeleteHaving encountering several error code issues, Yahoo is well known for sending and receiving emails. Although these Yahoo temporary error 999 can be fixed out with some technical skills, some of its individuals are not able to resolve them. In case, if you are the one facing such an issue, you must reach one of our experts instantly.
ReplyDeleteAT&T’s webmail service is a popular one for many user-friendly features it offers. However, some users have not been able to proceed through the att.net/mail restore feature to get deleted important emails. If you are too not able to restore your needy emails, you must try connecting with our ATT expert team right away.
ReplyDeleteIt is very helpful and informative blog post. i would like to thankful to you providing such a information i have also have website providing very good information.
ReplyDeletenorton.com/setup
thanks for sharing this great content
ReplyDeleteBuy Dankwoods Backwoods Online
Buy Backwoods Online
Buy Dankwoods Online
Buy Packwoods Online
Need to learn more on this please help me providing even more information on this and thanks for sharing your views on this. iot training in hyderabed
ReplyDeletePayPal error messages are not uncommon among users anymore. One of the most common errors is PayPal error code 10486. If you are getting stuck with such an error code issue, contact our PayPal tech expert team available 24/7 for instant help.
ReplyDeleteRecovering lost or deleted important emails from the ATT mail account is not as difficult as many would think of. There is having a way – restoration feature via which you can restore permanently deleted ATT emails if you are struggling with such. Contact our technical team if you are failed to do it.
ReplyDeleteYahoo is one of the oldest and popular web-based operators offering many services for the convenience of millions of users. The web platform is also best known for its exceptional user-friendly features. However, in most cases, users fail to proceed over the Yahoo account recovery process. If you are too not able to recover your account in any way, contacting us would be much help.
ReplyDeleteLooking for Canon printer which drivers, ink, drums, and if you have any problem due to printing, or print blank pages can call our technical instructor especially for Canon printers.
ReplyDeleteNote: How do i Scan from my canon printer to my computer?
Thanks for sharing such great knowledge with us. Looking for some more information from your blog.
ReplyDeleteCash for Cars Ipswich
Cash for Cars Gold Coast
Never thought that binary could been of great help, because I have lost a lot trying to make profit, until I met Mr George Arthur who has made me bounce back on my feet with smiling face making me recover all I have lost to scam broker through his master class strategy you can reach him Via whatsapp+44 7955 738814 or email him on georgearthur097@gmail .com. My regards to him
ReplyDeleteNarsee Monjee Solved Assignment Sample
ReplyDeleteOnline Narsee Monjee Solved Assignment
Narsee Monjee Distance Learning Solved Assignment Sample
Cheap Narsee Monjee Solved Assignment Sample
Narsee Monjee Solved Assignment Writing
Narsee Monjee Solved Assignment Writing Service in Noida
Narsee Monjee Solved Assignment Writing Service in Mumbai
Narsee Monjee Assignment Writing Service in Delhi
Solved Assignment for Narsee Monjee Institute of Management Studies
BT Mail Login - check in to My BT Email account or do BT Internet Sign In to enjoy the e-mail Services and you will also create an BT Account.
ReplyDeleteBT Mail
ReplyDeleteMcafee Login : Thanks for sharing this fantastic Article, really very informative. Your writing skill is very good, you must keep writing this type of Article. McAfeePro Antivirus is the key to protect your digital world from malicious web content and cyber threats. Download McAfeePro to activate the file via Mcafee Login for more information visit us at : https://mcafeepro.com.
Mcafee Login My Account : I have read your article which is quite good to go through with this. Your blog is excellent. You can also visit Mcafee Login My Account https://mcafeepro.com to protect your devices. Mcafeepro antivirus I personally used for 7 years its popular virus protection software which secures my system from the online threats.
ReplyDeleteThanks for an idea, you sparked at idea from a angle I hadn't given thought to yet.Now lets see if I can do something productive with it.
ReplyDeleteArduino
I am very happy to read this. This is the kind of manual that needs to be given and not the random misinformation that’s at the other blogs. Appreciate your sharing this best posting. Cash for Cars Brisbane
ReplyDeleteDownload software – canon.com/ijsetup doesn’t provide the manual CD for driver installation any more. Therefore, it becomes vital to download your printer's correct model driver. Further ensure that you have downloaded driver as per your OS version compatibility (Windows or MAC). Canon ij setup | Canon ij printer setup | canon.com/ijsetup | ij.start.canon | canon ij setup
ReplyDelete
ReplyDeleteMcAfee Total Protection is concerned, it will automatically run the Vulnerability Scanner on a specific date. You can even create a schedule and then choose to run the scan every week, every alternate week, or on a monthly basis, as per your choice. For more information visit our website! https://mcafeepro.com/
I just want to say that all the information you have given here is helpful, It’s really nice blogDomestic Made Insurance in SingapurHioki’s decision to start shipping the tester with the L2020 as a standard accessory reflects growing demand for the lead. China Taiping.
ReplyDeleteMy testimony of Getting ex back after breakup
ReplyDeleteMy boyfriend of 4years broke up with me and I was 3 weeks pregnant. I have cried myself to sleep most nights. Sometimes I stay awake almost all night thinking about him and start to cry all over again. Because of this I end up not having energy for my next day’s classes, my attendance has dropped and am always in uni and on time. Generally he is a very nice guy, he ended it because he said we were arguing a lot and not getting along. He is right we’ve been arguing during the pregnancy a lot. After the break up I kept ringing him and telling him I will change. I am in love with this guy and he is the best guy I have ever been with. I’m still hurt and in disbelief when he said he didn’t have any romantic feelings towards me anymore that hurt me faster than a lethal syringe. He texts me once and then mainly to check up on how am doing with the pregnancy, he is supportive with it but it’s not fair on me, him texting me as I just want to grieve the pain and not have any stress due to the pregnancy. I was really upset and I needed help, so one day I came across a website that suggested that Dr. Imoloa can help solve marital problems, restore broken relationships and so on. So I felt I should give him a try. I contacted him and he told me what to do and I did it then he did a spell for me. 2 weeks later, my boyfriend came to me and apologized for the wrongs he did and promised never to do it again. Ever since then, everything is back to normal. I and my boyfriend and I are living together happily again. Dr. Imoloa as it is a place to resolve marriage/relationship issues, do you want to be sure if your spouse is being faithful to you or Do you want your Ex to come back, power to control crowd, happy marriage love spell, unable to get pregnant, Loto Spell, protection spell, traveler spell, job spell, attraction charms, extreme protections and so on. Contact him Via Email-drimolaherbalmademedicine@gmail.com / Whatsapp- +2347081986098. Website- drimolaherbalmademedicine.wordpress.com
Hello!
ReplyDeleteWe used a lot of the content that you shared, it was useful and great, your website was introduced to me by a friend of mine, sometimes I visit your website, I enjoy your content. I introduced your website to my friends.
Good luck.
For information on information about different types of cars or any other vehicle, you can visit our website.
cash for scrap car
Are you looking for a cash for cars sunshine coast
ReplyDeleteA1 Auto Recycling is a professional car buyer that will take away all the hassles of selling your car privately, finding a potential buyer, and having strangers visit your home.
McAfee Activate - For successful download and installation of the McAfee antivirus software, visit mcafee.com/activate, and enter the McAfee activation code.
ReplyDeleteMcAfee Antivirus Tools are developed by Symantec Corporation, provides a complete Anti-Virus suite for PCs.o to your McAfee Antivirus software and Open it. · Enter the 25 digits alpha-numeric product key that was mailed to you
ReplyDeletewww.mcafee.com/activate
mcafee.com.com/activate"
<a href="https://mcafee-activation.com/>mcafee activation</a>
NBA 2K21 MT is an important currency of NBA 2K21. If you need to add amazing players, it means you need a lot of NBA 2K21 MT. You can do it quickly by completing tasks. When it is difficult to obtain NBA 2K21 MT, you can purchase NBA 2K21 MT on GameMS as needed, click: NBA 2K21 MT Ensure you are in a safe environment.
ReplyDeleteSell Your Unwanted Car-Truck-Van-Suv-4wd-Wagon For Top Cash. We Come To You. Call Us Now. Get A Quote. View Blog. Chat Support Available. View Locations. Types: Sedan, Suv, 4wd, Truck, Van, Wagon, Double Cab.
ReplyDeleteWow, What an Excellent post. I really found this to much informatics.
ReplyDeleteRead More: 10 Australian Road Rules You Probably Didn’t Know About
This is really great informative blog. Keep sharing. Find the Similar one on my Site KMRSoft
ReplyDeleteThis comment has been removed by the author.
ReplyDelete123moviesonline
ReplyDelete9XMOVIES
123moviesonline
13377X
We pay our customers up to $9,998 for their old, scrap, or unwanted cars, and offer a free quote and complimentary removal services. Selling a car is easy with us, we have a wide network of clients all over QLD which can help us in selling your car within 24 hours.
ReplyDeletecar wreckers logan
APlus Car Removal came into existence with a big mission. Mission to improve people’s lives. Aplus Car Removal knew if they want to provide customers more value than the competitors, they needed to improve their processes exponentially. This started the journey of continuous improvement and success.
ReplyDeleteCash for cars Sydney
We pay our customers instant cash up to $9,999 without any waiting time. It is our policy to not let customers wait for their money. We also provide free towing services, so customers save even more money when dealing with us. This strategy has been a great success with our customers in Queensland. Through this, we gained a lot of goodwill from our customers.
ReplyDeletecontact us via phone: 0428777070
car removal toowoomba
A1 Wreckers is reliable cash for car business in the Brisbane area. We believe that customers' time should be spent doing things they want, not spending time thinking of ways to get top cash for their car on the market.
ReplyDeletecash for car gold coast
Thank you for sharing.
ReplyDeleteSalesforce Online Training
Cash 4 Cars Victoria has been transforming the way people sell their damaged cars since 2010. Cash 4 Cars Victoria is located in Victoria and caters to customers all over the state. Our goal is to be Victoria’s most used cash for car facility and we have adapted our processes to achieve it.
ReplyDeletecontact us: 041 231 5595
Cash for Cars Victoria
Servo Problems With Arduino In this first part you have mentioned about the servo device which used to control power. there is no use of Arduino servo without power.
ReplyDeleteoffice.com/setup
sell your car for cash
ReplyDeletecash for car brisbane
sell your car for cash
ReplyDeletecash for car brisbane
Therefore, you'll have more time for yourself. If you live far from your workplace, you'll have time to take a nap soundly at the back of the car. Sakarya araç kiralama
ReplyDeleteAmazon and Hulu have been catching up to Netflix when it comes to quality. In fact, one of the best-rated current TV series,
ReplyDeleteThe Handmaid's Tale, is a Hulu original and exclusive to the service, When it comes to streaming services creating original content, however, Netflix is the clear winner.
In terms of "high quality" movies (those with at least a 7.5 rating on IMDb), Prime Video is virtually tied with Netflix. And both Netflix and Hulu have more high quality shows
those with an 8 rating or higher) than Prime Video, But without ads, it's still less expensive than Netflix's most popular plan.
www.primevideo.com/mytv
netflix.com/activate
netflix.com/activate
www.netflix.com/redeem
www.netflix.com/giftcard
www.netflix.com/tv8
www.netflix.com/code
www.netflix.com/tvhelpm
Fast Cars Removal was created to fill the need for efficient car buying companies. Most car buyers ten years ago were junkyards. These junk yards did take your old vehicle but never paid much. To fill this gap Fast Cars Removal came into existence.
ReplyDeletecash for scrap cars
Junk Car Removals have been offering services across Brisbane regions, including Inner Brisbane, Northern Regions, Southern part, Eastern Suburbs, Western Region, Ipswich, Logan City, Gold Coast and surrounding areas.
ReplyDeleteTop cash for cars is the right company when it comes to selling a car fast and quickly 0483-333-444 Cash For Cars Brisbane
Salisbury Car Removals started their journey with just one scrapyard and an aim to become Australia’s top car removal service. We have grown exponentially ever since. Now we are full-fledged cash for car service providing a variety of services such as car removal, cash for cars, car wrecking, and more.
ReplyDeletecash for cars brisbane
There are many reasons to sell my car Brisbane and cash for cars is the main reason. We offer you as high as $9,999 cash that is paid on the spot. With us, even your worthless vehicle has value.
ReplyDeletesell my car for cash now
Canberra Cash 4 Cars was started to fulfill the gap in the market for cash for scrap car services. End-of-life vehicles were piling up in the area with only a few places for them to be sold.
ReplyDeletescrap car removal Canberra
Ezy Cash for Cars is the most dominant car buyer company in Brisbane, Qld with quick money for your damaged cars and free removal service in and around the city. We will deal with all the legal procedures and it's easy for you to sell your old car. After checking your car, we will give you on the spot cash which will be genuine for your car. You can expect an amount of up to 15000$ and 20 %more than other dealers.Get top Cash for Cars Brisbane from Ezy Cash.
ReplyDeleteJunk Car Removals is the best Cash For Cars Brisbane Up To $12000 With Free Car Removal Brisbane, Get Top Cash For Junk Cars, Vans, Suv, Truck in Brisbane, Gold Coast, Ipswich, Logan, Caboolture, Sunshine Coast, Inner Brisbane, South Brisbane, North Brisbane, West Brisbane and East Brisbane
ReplyDeletecash for cars brisbane
Car Removal Logan
Junk Car Removals is the best Cash For Cars Brisbane Up To $12000 With Free Car Removal Brisbane, Get Top Cash For Junk Cars, Vans, Suv, Truck in Brisbane, Gold Coast, Ipswich, Logan, Caboolture, Sunshine Coast, Inner Brisbane, South Brisbane, North Brisbane, West Brisbane and East Brisbane
ReplyDeletecash for cars brisbane
Free Car Removal Brisbane
ReplyDeleteUse to turn speech into text quickly. Download the latest version and work in Voice mode and be Hands-Free. Dictate Documents and complete the transcription faster. Dragon Naturally Speaking | DragonNaturallySpeaking
This comment has been removed by the author.
ReplyDeleteYou contect is very goog...And We are provide nmims solved assignment And other types of assignment for
ReplyDeleteStudents.
Onroadz offers all brand new luxury self drive cars to deliver the royal lifestyle. You can hire our luxury rental cars at low rent especially during the wedding, family trips and business trips etc. We are best in offering self driven cars in and around Trichy at the cheapest rates. Onroadz provides complete guidance for hiring a rental car at any time and make your trip memorable. Book your favourite car and explore your hassle-free journey.
ReplyDeleteThank you for sharing this valuable content.
ReplyDeleteI love your content it's very unique.
DigiDaddy World
The Canon IJ is the most ideal choice for the users for printing high-quality documents.
ReplyDeletecanon.com/ijsetup |
ReplyDeleteYou Blog content is very good.And slove zone provide assignment services.
Ignou Solved Project Report
Ignou Solved Synopis
NMIMS Solved Assignment
Amity solved Assignment
Amity Solved Project
Assignment Writing Service
thanks for sharing this information
ReplyDeleteamazon.com/redeem
googleplay.com/redeem
roblox.com/redeem
amazon.com/redeem
amazon.com/redeem
amazon.com/redeem
Car active is the best platform to sell old car for cash so just visit us.
ReplyDeletePaying cash for cars so here is Car active. however the blog is very informative!
ReplyDeletecash for used car gold coast
I am really happy to say it’s an interesting post to read . I learn new information from your article , you are doing a great job . Keep it up
ReplyDeleteDevops Training in Hyderabad
Hadoop Training in Hyderabad
Python Training in Hyderabad
Tableau Training in Hyderabad
Selenium Training in Hyderabad
ReplyDeleteIn this technology, electric power used for charging is transmitted over radio waves.
professional battery manufacturer
Hello loved all that you shared and you are right thanks for providing this important blog with us about cash for cars sydney with unique content and ideas it will very helpful thanks a lot for sharing have a nice week.
ReplyDeletecash for cars sydney
Thanks for sharing good informative blog!A well written article with a motive to share the information.I agree Arduino itself is very good at controlling servos. Thanks again for the writer!. You can also check this site Cash for Cars with us for best offer for your used cars.
ReplyDeleteGet up to 50% discount on health & beauty products from flipkart. Flipkart has many health & beauty brands with high reviewed by orignal users. If you wants to save money on your products then use Flipkart discount code at checkout page and save money.
ReplyDeleteSuch a very interesting post, keep sharing more on this topic it was really helpful
ReplyDeleteI was facing some issues of CCTV camera installation in Islamabad, thanks for your help.
ReplyDeleteTroubleshoot Yahoo mail not working on Chrome issues
ReplyDeleteIf you are struggling with Yahoo mail not working on Chrome issues, the first thing you should be doing is to clear all the cache, cookies, and the entire history of the browser. You also need to update the Google Chrome Internet browser on your device to ensure continued services from Yahoo. The JavaScript is essential to run correctly on Chrome; hence check if the Javascript is enabled to get the problem solved.
Also Read:-
Outlook search indexing not working
Change Outlook email signature on iPhone
How do i recall an email in Outlook
Create a second Gmail account
Change Gmail Theme On iPhone
How to talk to a live person at Yahoo
How to transfer outlook emails to new computer
Thanks for sharing such an amazing article, really informative
ReplyDeleteThanks guys for the lovely read. Very useful regards to the server. We have shared the blog to our car removal team
ReplyDeleteCash For Cars
Cash For Cars Melbourne
Thanks for the useful information about servo motors.
ReplyDeleteThanks for the useful information about servo motors.
ReplyDeleteImmense AlkalineBattery and LR6 AA Alkaline BatteryYou can use the battery for all kinds of products, such as MP3 players, cameras, toys, clocks, remote controls and many more.
ReplyDelete6LR61 Alkaline Battery
LR6 AA Alkaline Battery
LR03 AAA Alkaline Battery
LR08 AAAA Alkaline Battery
LR14 C Alkaline Battery
LR20 D Alkaline Battery
aaaa 1.5v Alkaline Battery
C Lr14 1.5v Alkaline Battery
6 lr61 9v Alkaline Battery
d lr20 1.5v Alkaline Battery
eco friendly alkaline battery
anti leak alkaline battery
durable alkaline battery
long life alkaline battery
alkaline battery
You are looking for 2022 Dodge Dakota and upcoming cars then you must check all of it.. How to find the New Upcoming Cars to get information
ReplyDeleteWhat Month Do New Car Models Come Out to get all information..
KMSpico is also based on KMS, which is used by Microsoft to validate the Microsoft Windows and its related products. We can say that keys that are being generated and used by this software are published by the same team of Microsoft, especially for those people who can’t afford a real copy of Windows 10 or any other version. Instead of activating the Windows operation system only. It can also be used to activate almost any version of Microsoft Office.
ReplyDeleteWindows 10 Activator Free Download
WINDOWS ACTIVATOR
Windows 10 Activator 2021
Windows 10 Activator
OfficeStac is Singapore based office renovation provider and commercial reinstatement experts offering top-notch services at the most affordable price. We are a team of professionals with more than 30 staff to provide all types and sizes of customized interior renovation and restoration services.
ReplyDeleteWe are the leading reliable email database providers usa, provide information about people, like their name, organization, email id, social profile id or phone number, all of which your organization can initiate a business relationship with them. Our lead generation service is economical and we assure you of the best return on investment. We are the most flexible lead generation agency in usa for small businesses, realtors, and contractors. Instead of maintaining marketing and sales teams for your company, it is better to collect the lead database from us. It’s not much costlier than the salaries for your marketing team.
ReplyDeleteNice article Thank you so much for sharing with us. in case, if Gmail not work properly visit at: fix Gmail problem on window 10
ReplyDeleteNice post Thankyou so much for sharing with us. in case Gmail not work properly visit at: href="https://morioh.com/p/172b281d0974/"< How to block promotion Emails on my outlook account
ReplyDeleteCash for Cars……Yes you heard it right. We give cash for you junk/old/unwanted cars and give top cash up to $15000. We are here to buy any cars it can be good or bad, running or not, newer or old, we buy cars at any condition, any model, any year.
ReplyDeletecash for scrap cars brisbane qld
cash for scrap cars sunshine coast
cash for scrap cars sydney nsw
cash for scrap cars gold coast qld
cash for scrap cars toowoomba
cash for scrap cars ipswich
cash for scrap cars logan
cash for scrap cars morayfield
cash for scrap cars kingaroy
IMAP AOL.COM Not Responding on iPhone,Why is AOL Not Working on iphone Are you Facing the Both type Problem Please Click Here Link and Visit Page -
ReplyDeleteIMAP AOL.COM Not Responding on iPhone
Why is AOL Not Working on iphone
Visit canon’s official site – ij.start.canon/ts3122 and download appropriate software and drivers one windows PC. You can also go to canon.com/ijsetup and use the “TS3122” name to get the latest software. Or if you have a CD, install it. The setup process for every Canon model is almost similar, however the download through https //ij.start.cannon or http //ij.start.cannon and installation process may differ. ij.start canon is the manufacturer's site to download Canon printer drivers. Install and set up Canon Printer from ij.start.canon and obtain high-quality printing documents straightforwardly. cannon/ijsetup .Sign in to your COX Webmail account to send or receive new Address Book messages, handle spam messages, access advanced email devices. Cox webmail Login
ReplyDeleteMcAfee is an antivirus that covers all of your system's security needs. McAfee takes care of everything, whether it's Windows, iOS, or Android. McAfee offers a comprehensive range of solutions that include VPN, Antivirus, Cloud, Endpoint, and other network and privacy security choices. www.mcafee.com activate offers a wide choice of protection plans to meet your various security requirements.
ReplyDeleteReally wonderful blog completely enjoyed reading and learning to gain the vast knowledge. Eventually, this blog helps in developing certain skills which in turn helpful in implementing those skills. Thanking the blogger for delivering such a beautiful content and keep posting the contents in upcoming days.href="https://www.serviceonstreet.com/washing-machine-repair-service-hyderabad/">Best Washing Machine Repair Service in Hyderabad
ReplyDeleteThe technology sector changes rapidly. It seems like every day a new gadget is being made available to the public. For those "techies" interested in the latest and greatest technological information, a good tech news blog or website is a great way to stay informed.
ReplyDeleteExcellent Blog! I would like to thank you for the efforts you have made in writing this post. Gained lots of knowledge.
ReplyDeletehttps://www.serviceonstreet.com/refrigerator-repair-gas-filling-service-hyderabad/
I have read your article. very nice. I also Like it.
ReplyDeleteAll the contents you mentioned in post is too good and can be very useful. I will keep it in mind, thanks for sharing the information keep updating, looking forward for more posts.
ReplyDeletehref="https://www.serviceonstreet.com/washing-machine-repair-service-hyderabad" rel="nofollow">Washing Machine Repair Service in Hyderabad
Online Shopping in Pakistan
ReplyDeleteThank you so much for providing good quality information.
Are you someone who is constantly searching- Indian nanny jobs near me in your browser? Then you have landed at the right place. Desi Domestic Service LLC always welcomes hardworking people.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteA very excellent blog post. I am thankful for your blog post. I have found a lot of approaches after visiting your post.
ReplyDeletecash for old cars
Simply want to say your article is as surprising. The clearness in your post is simply great and i could assume you are an expert on this subject
ReplyDeleteHouse Renovations in Battersea
Hello
ReplyDeleteIt is good article blog thanks for sharing.
ij.start.canon setup
canon.com/ijsetup
Lord Bubuza has done it for me, His predictions are 100% correct, He is real and can perform miracles with his spell. I am overwhelmed because I just won 336,000, 000 million Euro from a lottery jackpot game with the lottery number lord Bubuza gave me. I contacted lord Bubuza for help to win a lottery via WhatsApp: +1 984 240 7211, he told me that a spell was required to be casted so that he can predict my winning, I provided his requirements for casting the spell and after casting the spell he gave the lottery numbers and a website where I played and won 336,000,00 euros. How can I thank this man enough? His spell is real and like a God on Earth. Thank you for changing my life with your lottery winning numbers. Do you need help to win a lottery too? contact lord Bubuza via WhatsApp: +1 984 240 7211 or e-mail: lordbubuzamiraclework @ hotmail . com
ReplyDeleteRcarduino: Servo Problems With Arduino - Part 1 >>>>> Download Now
ReplyDelete>>>>> Download Full
Rcarduino: Servo Problems With Arduino - Part 1 >>>>> Download LINK
>>>>> Download Now
Rcarduino: Servo Problems With Arduino - Part 1 >>>>> Download Full
>>>>> Download LINK
Bharat Matrimony USA | Are you looking for a suitable matrimonial match? Then you can register at Desi Wedlocks which is also known as Bharat matrimony in the USA. This is a matrimonial website that offers personalized matchmaking services so that you don’t fall into the trap of fraudsters. Each profile is physically verified by their team and the contact details are only shared when both parties agree to meet with each other. They handpick the profiles as per the mutual interests of the people. Their matchmaking services are offered to people living in India as well as the USA (including all communities and religions). So end your spouse hunting with us!
ReplyDeleteAchieve your goals of expansion to the Middle East while saving time and money with our International Professional employer of record dubai services.Enter any of the markets of this thriving and flourishing region by having a trustworthy partner that can assist you on each stage of the process from managing your Payroll to HR management.
ReplyDeleterpa uipath training in bangalore Are you looking for a training institute that offers the best prakalpana training in Bangalore? Look no further than Prakalpana Academy! Prakalpana Academy is the leading provider of prakalpana training in Bangalore.
ReplyDeleteWe offer aem training in bangalore comprehensive training program that covers all aspects of prakalpana, from basic concepts to advanced techniques. Our program is designed to help you learn the skills and knowledge necessary to become a successful prakalpana practitioner.
pcb design training in bangalore Prakalpana Academy is located in the heart of Bangalore, close to all major transportation hubs.
We are open
Docker training Course in Bangalore Monday through Friday 9:00am to 5:00pm. Contact us today to schedule a consultation or register for our next class!
Some pcb design training in bangalore of our popular courses include training, soft skills training, leadership development, project management,Change Management etc.
ReplyDelete
ReplyDeleteWe also offer pcb design training in bangalore customized training programs that are designed to meet the specific requirements of our clients.
pcb design training in bangalore focus is on providing quality training that helps our participants to enhance their knowledge, skills and competencies.
ReplyDeleteHai! Nice blog you had , Thanks for sharing article
ReplyDeletejava online training in hyderabad
I was thrilled to come across this informative blog post discussing servo problems with Arduino. As an Arduino enthusiast, I have encountered my fair share of challenges when working with servos, so this article immediately caught my attention. While reading about the various servo problems, I couldn't help but draw a parallel with the services provided by Best Cash For Scrap Car Blacktown. Just like troubleshooting servo problems requires expertise, dealing with scrap cars necessitates the assistance of professionals who can provide the best solution.
ReplyDeleteAs an Arduino enthusiast myself, I always appreciate in-depth discussions on troubleshooting and problem-solving, especially when it comes to specific components like servos. Much like debugging a faulty servo, sometimes we encounter situations where we need to part ways with our vehicles quickly and efficiently. This is where services like top free car removal Melbourne come in handy.
ReplyDeleteAmazing topic selection! I am an assistant manager at scrap my car Canberra. We buy all types of old cars for cash Canberra-wide and pay you up to $9,999. This blog really helps me gain in-depth knowledge on this industry area.
ReplyDeleteNice Post!Thanks For Shairing. We are a car removal service provider in Brisbane and among its suburbs for years paying top Cash for car Brisbane of any make and model.
ReplyDeleteI found the content of this article to be very valuable. The services you provide would be useful to many car owners. At Australian dealers, you can choose from a variety of car models and makes, so you can buy a car of your choice. There are other vehicle recyclers that also accept this type of vehicle, such as Adrian's Cash for Cars Gold Coast, which accepts a wider range of vehicle types.
ReplyDeleteThis is one of the best blog,
ReplyDeleteBlogging is one of my favorite hobbies
ReplyDeleteAğrı
ReplyDeleteDiyarbakır
Bolu
Elazığ
Siirt
3BW8N5
Yalova
ReplyDeleteHatay
Muş
Bursa
Mersin
UWS
görüntülü
ReplyDeleteucretli show
JEJ
Get top cash up to $15,999 and enjoy free removal services with our hassle-free process. We buy vans of all makes, models, and conditions. Contact us today for a quick and convenient transaction!. Cash For Vans Removal
ReplyDelete